Genaue Details:
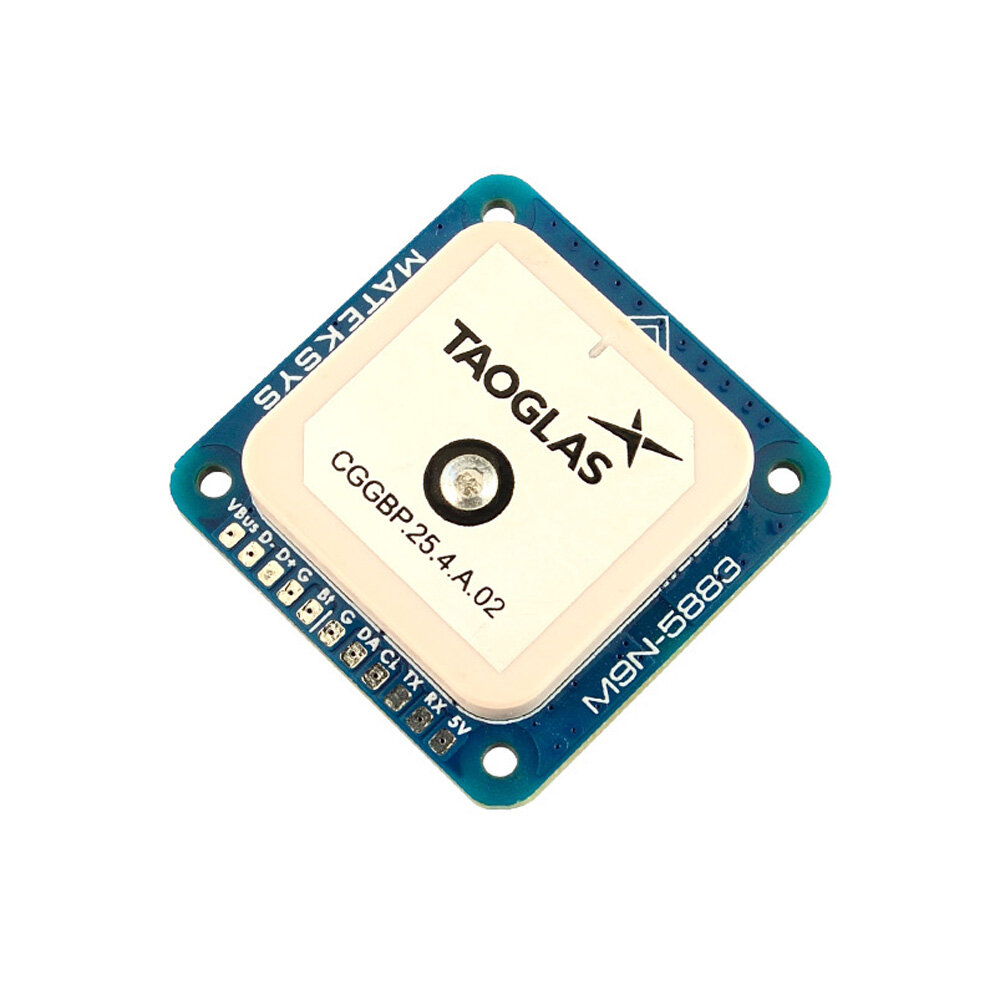
GPS-Modul Matek-Systeme GNSS M9N-5883 NEO-M9N mit Magnetkompass QMC5883L, unterstützt GLONASS, Galileo für FPV RC Racing Drohne
M9N-5883 verwendet Multi-Konstellations-GNSS, angetrieben von u-blox NEO-M9N. NEO-M9N ist ein simultaner GNSS-Empfänger, der mehrere GNSS-Systeme empfangen und verfolgen kann. Dank der Multi-Band-RF-Front-End-Architektur können gleichzeitig alle vier Haupt-GNSS-Konstellationen - GPS, Galileo, GLONASS und BeiDou - empfangen werden.
Weitere Infodermationen zu NEO-M9N finden Sie auf der u-blox NEO-M9N Seite
Beschreibung:
Marke: Matek-Systeme
GNSS u-blox NEO-M9N (GPS, GLONASS, Galileo und BeiDou)
Magnetischer Kompass QMC5883L
Patch-Antenne 25*25*4mm
Eingangsspannungsbereich: 4 ~ 6V (5V Pad/Pin)
Stromverbrauch: 50mA
-20~80 °C
UART (TX, RX) Schnittstelle für GNSS NEO-M9N
I2C(DA, CL)-Schnittstelle für Kompass QMC5883L
JST-GH-6P-Steckverbinder
3.3V Power-LED, rot
GNSS PPS LED, grün, blinkt (1 Hz), wenn das GNSS 3D-Fixierung hat
32mm*32mm*10mm
14.5g
Verkabelung und Einstellungen
M9N-5883 5V zu Flugsteuerung 4 ~ 6V
M9N-5883 RX zu UART_TX des Flugcontrollers
* M9N-5883 TX zu Flightcontroller UART_RX
* M9N-5883 CL zum Flugsteuerungs-I2C_SCL
* M9N-5883 DA zum Flugcontroller I2C_SDA
* M9N-5883 G zum Flugcontroller GND
* Kompassausrichtung (Pfeil nach voderne und flache Montage):
INAV / BetaFLight: Um 270° im Uhrzeigersinn drehen, wenn der Pfeil des Flugcontrollers nach voderne zeigt
Ardupilot/Mission Planner: Keine Rotation
* Protokoll: Ublox oder NEMA
* Stellen Sie sicher, dass der Kompass / Magnetometer 10 cm von Stromleitungen / ESC / Motoderen / eisenbasierten Materialien entfernt ist
Die Kratzer auf der keramischen Antenne sind das Ergebnis der Abstimmung der Antenne.
* u-center für Windows
STL und STEP
M9N-5883_step.zip
M9N-CAN_shell_STL.zip
Tipps
ArduPilot unterstützt NEO-M9N gut
INAV2.5 ublox / ublox7 / NEMA unterstützt NEO-M9N derzeit nicht. INAV2.6 erfoderdert ein neues Protokoll
Das Betaflight UBLOX-Protokoll unterstützt NEO-M9N nicht. Bitte wählen Sie das NEMA-Protokoll und Auto Baud.
Vergleich der GNSS-Serie von Mateksys
| SKU | M9N-5883 | M9N-CAN | M8Q-CAN | M8Q-5883 | SAM-M8Q |
| ublox | NEO-M9N | NEO-M9N | SAM-M8Q | SAM-M8Q | SAM-M8Q |
| GNSS | GPS
BeiDou
GLONASS
Galileo | GPS
BeiDou
GLONASS
Galileo | GPS
GLONASS
Galileo | GPS
GLONASS
Galileo | GPS
GLONASS
Galileo |
| ungefähr 30 Sats | ungefähr 30 Sats | ungefähr 20 Sats | ungefähr 20 Sats | ungefähr 20 Sats |
| Positionsgenauigkeit | 2.0m CEP | 2.0m CEP | 2.5m CEP | 2.5m CEP | 2.5m CEP |
| Verfolgung und Navigation. | -167 dBm | -167 dBm | –165 dBm | –165 dBm | –165 dBm |
| Wiedererwerb | -160 dBm | -160 dBm | –158 dBm | –158 dBm | –158 dBm |
| Kaltstart | -148 dBm | -148 dBm | –146 dBm | –146 dBm | –146 dBm |
| Schnellstart | -159 dBm | -159 dBm | -155 dBm | -155 dBm | -155 dBm |
| Navi-Aktualisierungsrate | 25Hz | 10Hz | 10Hz | 10Hz | 10Hz |
| | | | | |
| Kompass | QMC5883L | QMC5883L | QMC5883L | QMC5883L | / |
| Barometer | / | DPS310 | DPS310 | / | / |
| Schnittstelle | UART + I2C
6Wires | CAN, 4Drähte
oder
UART, 3Wires | CAN, 4Drähte
oder
UART, 3Wires | UART + I2C
6Wires | UART
4Wires |
| CAN-Knoten | / | Digitale Luftgeschwindigkeit | Digitale Luftgeschwindigkeit | / | / |
| | | | | |
| GRÖẞE | 32*32*10 | 32*32*10 | 29*29*10 | 20*20*10.5 | 26816*7.5 |
| Gewicht | 14.5g | 15g | 11.3g | 7g | 7g |
Paket enthalten:
1x M9N-5883
1x JST-GH-6P zu JST-GH-6P 20cm Silikonkabel