Genaue Details:
FC Spezifikationen
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Blackbox: MicroSD-Kartenslot
6x UART, 1x Softserial_Tx Option (INAV)
12x PWM-Ausgänge
1x I2C
4x ADC (VBAT, Strom, RSSI, Luftgeschwindigkeit)
1x Ersatz-PINIO
USB / Beep-Verlängerung mit Type-C(USB2.0)
Integrierter Inverter auf UART2-RX für SBUS-Eingang
Umschaltbarer doppelter Kamerazugang
FC Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 oder neuer)
Firmware für Flugsteuerung Hier klicken
PDB
Eingangsspannungsbereich: 6.8-30V (2-6S LiPo)
Einschalwiderstand: 100A Dauerlast, 220A Spitze
5x ESC-Stromflächen, insgesamt 100A dauerhaft
Unterstützt eine kontinuierliche Last von bis zu 100A auf dem ESC-Pad in der Nähe des Stromsensoren-Widerstands
Unterstützung einer kontinuierlichen Belastung von bis zu 30A und einem Spitzenwert von 50A auf jedem ESC-Pad des Quadcopters
Batteriespannungsteiler 1K:20K (Skala 2100 in INAV, BATT_VOLT_MULT 21.0 in ArduPilot)
Aktueller Sensor: 220A, 3.3V ADC (Skala 150 in INAV, 66.7 A/V in ArduPilot)
BEC 5V Ausgang
Entwickelt für Flugsteuerung, Empfänger, OSD, Kamera, Summer, LED-Streifen 2812, GPS-Modul, AirSpeed
Dauerstrom: 2 Ampere
BEC 9V / 12V-Ausgang
Entwickelt für Videoübertrager, Kamera, Gimbal usw.
Dauerstrom: 2 Ampere
12V-Option mit Jumper-Pad
für eine stabile Ausgabe von 9V/12V sollte die Eingangsspannung größer als die Ausgangsspannung +1V sein
BEC Vx-Ausgang
Für Servos entwickelt
Einstellbare Spannung, 5V Standard, 6V oder 7,2V über Jumper
Dauerstrom: 8 Ampere, Spitze bei 10A
für eine stabile Vx-Ausgabe sollte die Eingangsspannung größer sein als die Vx-Spannung +1V
BEC 3.3V Ausgang
Entwickelt für das Baro/Kompass-Modul und externe 3,3V-Peripheriegeräte
Linearer Regler
Dauerstrom: 200mA
Physisch
Montage: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Abmessungen: 45 x 42 x 15 mm
Gewicht: 25g mit USB/Summer-Adapter
einschließlich
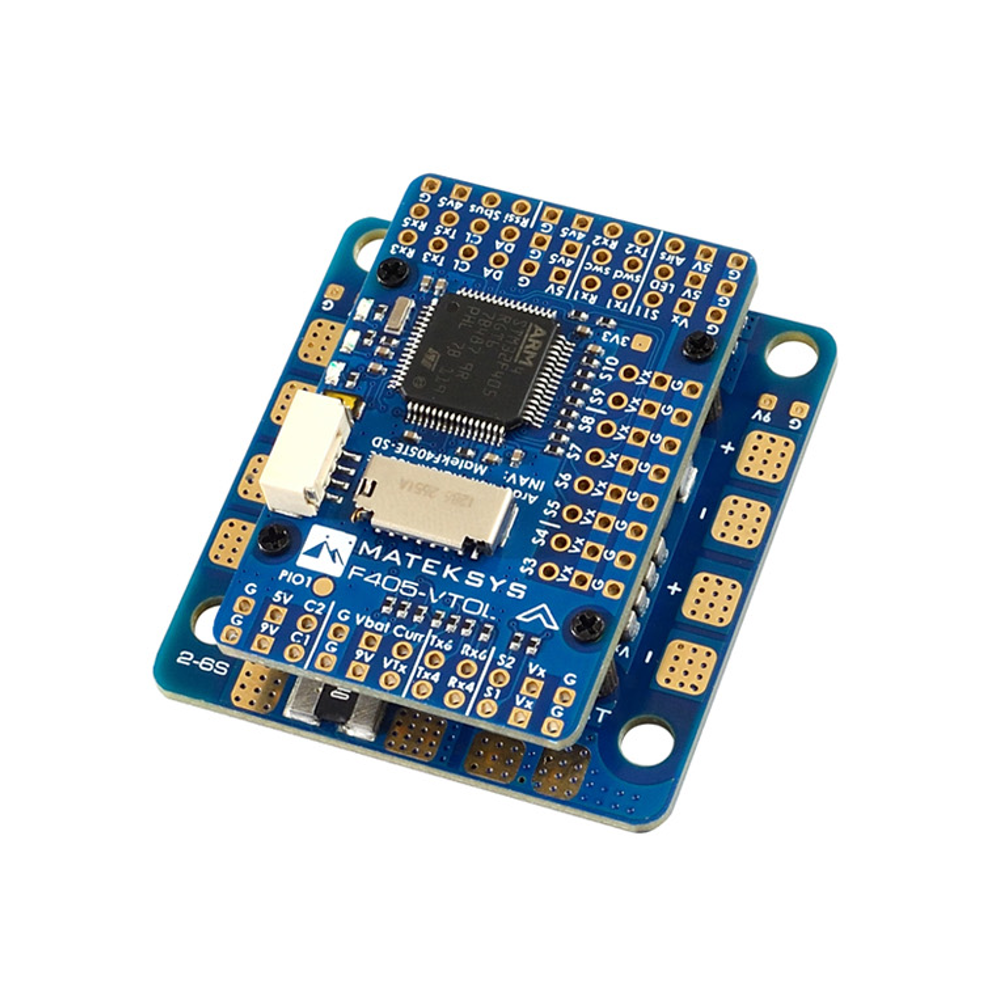
1x F405-VTOL
1x USB (Typ-C) / Piepser (passiver Summer) Extender + 20 cm JST-SH-6P zu JST-SH-6P Kabel für USB Extender.
1x 20cm JST-GH-4P auf JST-GH-4P Kabel für I2C-Anschluss
1x Rubycon ZLH 35V 470uF Kondensator
Dupont 2.54 Pins (Das Board wird ungelötet versendet)
Layout

VTOL-Verkabelung (ArduPlane)
Normale Flugzeugverkabelung (INAV)
INAV-Kartierung
PINIO
PINIO1 /PIO1 pad, standardmäßig niedriger Pegel, durch den Modus USER1 umschaltbar auf niedrigeren/höheren Pegel
PINIO2 ist zum Umschalten des Kameraeingangs über die Modi-USER2
Tipps
F405-VTOL hat INAV fw vorinstalliert für QC
Laden Sie INAV (Ziel MATEKF405TE_SD) fw 5.x oder neuer direkt aus dem INAV-Konfigurator 5.x oder neuer herunter.
ArduPilot Kartierung
Frsky Smartport Telemetrie
nicht invertiertes (gehacktes) S.Port-Signal
jeder Ersatz-Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 oder 10 (für yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (Umfragemodus)
Relais (PINIO)
PINIO1, PIO1-Pad, standardmäßig niedriger Pegel
PINIO2, Kameraumschalter, C1 STANDARDMÄSSIG EIN
#
PA4 PINIO1 AUSGANG GPIO(81) NIEDRIG //PIO1-Anschluss
PB5 PINIO2 AUSGANG GPIO(82) NIEDRIG //Kamera-Schalter
# RCx_OPTION: RC-Eingabeoption
28 Relais Ein/Aus
34 Relais2 Ein/Aus
35 Relais3 An/Aus
36 Relais4 Ein/Aus
zum Beispiel
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relais Ein/Aus, Verwenden Sie CH7 des Senders, um das LOW/HIGH-Level von PIO1 zu steuern
RELAY_PIN2 82 //Kamerumschalter GPIO
RC8_OPTION 34 //Relais2 Ein/Aus, Verwenden Sie CH8 des Senders, um das hohe/niedrige Niveau auf dem PB5-Pad zu steuern
Das konfigurierte Merkmal wird ausgelöst, wenn der pwm-Wert des Hilfsschalters höher als 1800 wird. Es wird deaktiviert, wenn der Wert unter 1200 fällt.
Überprüfen Sie den PWM-Wert,der vom Sender gesendet wird,wenn der Schalter hoch und niedrig ist,indem Sie den Bildschirm für die Funkkalibrierung in der Initial Setup >> Mandatory Hardware >> Mission Planner verwenden. Wenn er nicht höher als 1800 oder niedriger als 1200 steigt,ist es am besten,die Endpunkte des Servos im Sender anzupassen.
Tipps
F405-VTOL hat INAV fw vorinstalliert für QC
Das Ziel MATEKF405TE_SD ist nicht in INAV Configurator 4.x.x aufgeführt. Es wird von INAV5.0 oder neuer unterstützt.
ArduPilot fw, 'Interne Fehler 0x4000 l:213 spi_fail' Warnung, bitte setzen Sie LOG_BACKEND_TYPE = 1 (Datei) für die SD-Kartenprotokollierung.