Genaue Details:
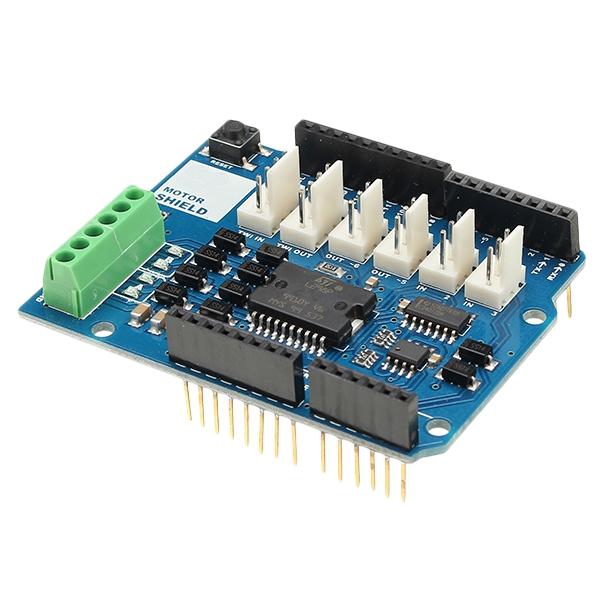
L298N L298P 4A Dual Channel Motortreiber Modul Motor Shield R3 Für
Beschreibung: Das Motor Shield basiert auf dem L298, einem dualen Vollbrücken-Treiber, der entwickelt wurde, um induktive Lasten wie Relais, Solenoids, Gleichstrom- und Schrittmotoren anzusteuern. Es ermöglicht Ihnen, zwei Gleichstrommotoren mit Ihrem Board zu betreiben und die Geschwindigkeit und Richtung jedes Motors unabhängig voneinander zu steuern. Sie können auch die Stromaufnahme des Motors jedes Motors messen, unter anderem. Das Shield ist
TinkerKit kompatibel, was bedeutet, dass Sie Projekte schnell erstellen können, indem Sie sie einstecken
TinkerKit Module auf dem Board.
Eigenschaft: - Arbeitsspannung: 5V ~ 12V
- Motorsteuerung:
L298Psteuert 2 Gleichstrommotoren oder 1 Schrittmotor
- Maximaler Strom: 2A pro Kanal oder maximal 4A (mit externer Stromversorgung)
- Stromerkennung: 1,65V/A
- Freilauf-Stopp- und Bremsfunktion
Über die Macht: Der Motor Shield darf nur von einer externen Stromversorgung betrieben werdenWeil der auf dem Shield montierte L298-IC zwei separate Stromanschlüsse hat, einen für die Logik und einen für die Motorstromversorgung. Der erforderliche Motorstrom überschreitet oft die maximale USB-Strombewertung.
Die externe (nicht USB) Stromversorgung kann entweder über ein Netzteil (Steckernetzteil) oder über eine Batterie erfolgen. Das Netzteil kann angeschlossen werden, indem ein 2,1-mm-Zentrum-positiver Stecker in die Strombuchse des Boards eingesteckt wird, auf dem das Motor Shield montiert ist, oder indem die Kabel angeschlossen werden, die die Stromversorgung zu den Vin- und GND-Schraubklemmen führen, wobei darauf geachtet werden muss, die Polaritäten zu beachten.
Um mögliche Schäden an der Platine, auf der das Schild montiert ist, zu vermeiden,
Wir empfehlen die Verwendung einer externen Stromversorgung mit einer Spannung zwischen 7 und 12VWenn Ihr Motor mehr als 9V benötigt, empfehlen wir Ihnen, das Stromkabel des Shields und das Board, auf dem das Shield montiert ist, zu trennen. Dies ist möglich, indem Sie den "Vin Connect"-Jumper auf der Rückseite des Shields durchtrennen.
Die absolute Grenze für Vin an den Schraubklemmen beträgt 18V.
Die Leistungspins sind wie folgt:
Vin am Schraubklemmenblock ist die Eingangsspannung für den Motor mit dem Schirm verbunden. Eine externe Stromversorgung, die an diesen Stift angeschlossen ist, liefert auch Strom für die Platine, auf der sie montiert ist. Durch das Abschneiden der "Vin Connect"-Verbindung wird dies zu einem dedizierten Netzkabel für den Motor.
GND Erden Sie den Schraubklemmblock.
Der Schild kann 2 Ampere pro Kanal liefern, insgesamt maximal 4 Ampere. Über Eingabe und Ausgabe: Dieser Schild hat zwei separate Kanäle, nämlich A und B, die jeweils 4 der Pins verwenden, um den Motor zu steuern oder zu erfassen. Insgesamt sind 8 Pins für diesen Schild in Verwendung. Sie können jeden Kanal separat verwenden, um zwei Gleichstrommotoren zu steuern oder sie kombinieren, um einen unipolaren Schrittmotor zu steuern.
Die Pins des Schilds, aufgeteilt nach Kanal, sind in der unten stehenden Tabelle aufgeführt:
| Funktion | Anstecknadeln pro Ch. A | Stifte pro Ch. B |
| Richtung | D12 | D13 |
| PWM | D3 | D11 |
| Bremse | D9 | D8 |
| Strommessung | A0 | A1 |
Wenn Sie die Bremse und die Stromsensierung nicht benötigen und außerdem mehr Pins für Ihre Anwendung benötigen, können Sie diese Funktionen deaktivieren, indem Sie die entsprechenden Jumper auf der Rückseite des Shields durchtrennen.
Die zusätzlichen Steckdosen auf dem Schild werden wie folgt beschrieben:
Schraubklemme zum Anschließen der Motoren und ihrer Stromversorgung.
2 TinkerKit-Anschlüsse für zwei Analogeingänge (in Weiß), an A2 und A3 angeschlossen.
2 TinkerKit-Anschlüsse für zwei analoge Ausgänge (in der Mitte orange), verbunden mit PWM-Ausgängen an den Pins D5 und D6.
2 TinkerKit-Anschlüsse für die TWI-Schnittstelle (in weiß mit 4 Pins), einer für die Eingabe und einer für die Ausgabe. Motorenverbindungen: Bürsten-Gleichstrommotor. Sie können zwei Bürsten-Gleichstrommotoren steuern, indem Sie die beiden Drähte jedes Motors an die (+) und (-) Schraubanschlüsse für jeden Kanal A und B anschließen. Auf diese Weise können Sie seine Richtung kontrollieren, indem Sie die DIR A und DIR B Pins auf HIGH oder LOW setzen, Sie können die Geschwindigkeit kontrollieren, indem Sie die PWM A und PWM B Tastverhältniswerte variieren. Die Bremse A und Bremse B Pins, wenn sie auf HIGH eingestellt sind, bremsen die Gleichstrommotoren effektiv ab, anstatt sie durch Abschalten der Stromversorgung zu verlangsamen. Sie können den Strom, der durch den Gleichstrommotor fließt, messen, indem Sie die SNS0- und SNS1-Pins lesen. Auf jedem Kanal wird eine Spannung proportional zum gemessenen Strom vorliegen, die als normaler Analogeingang durch die Funktion analogRead() an den analogen Eingängen A0 und A1 gelesen werden kann. Zur Vereinfachung ist er kalibriert, um 3,3V zu sein, wenn der Kanal seinen maximal möglichen Strom liefert, das sind 2A.
Paket enthalten: 1 x Motor-Treiber-Modul